The Calorimetric Electron Telescope (CALET) is a cosmic-ray observatory, operating since August 2015 on the external platform of the Japanese experimental module (KIBO/JEM) by the International Space Station.
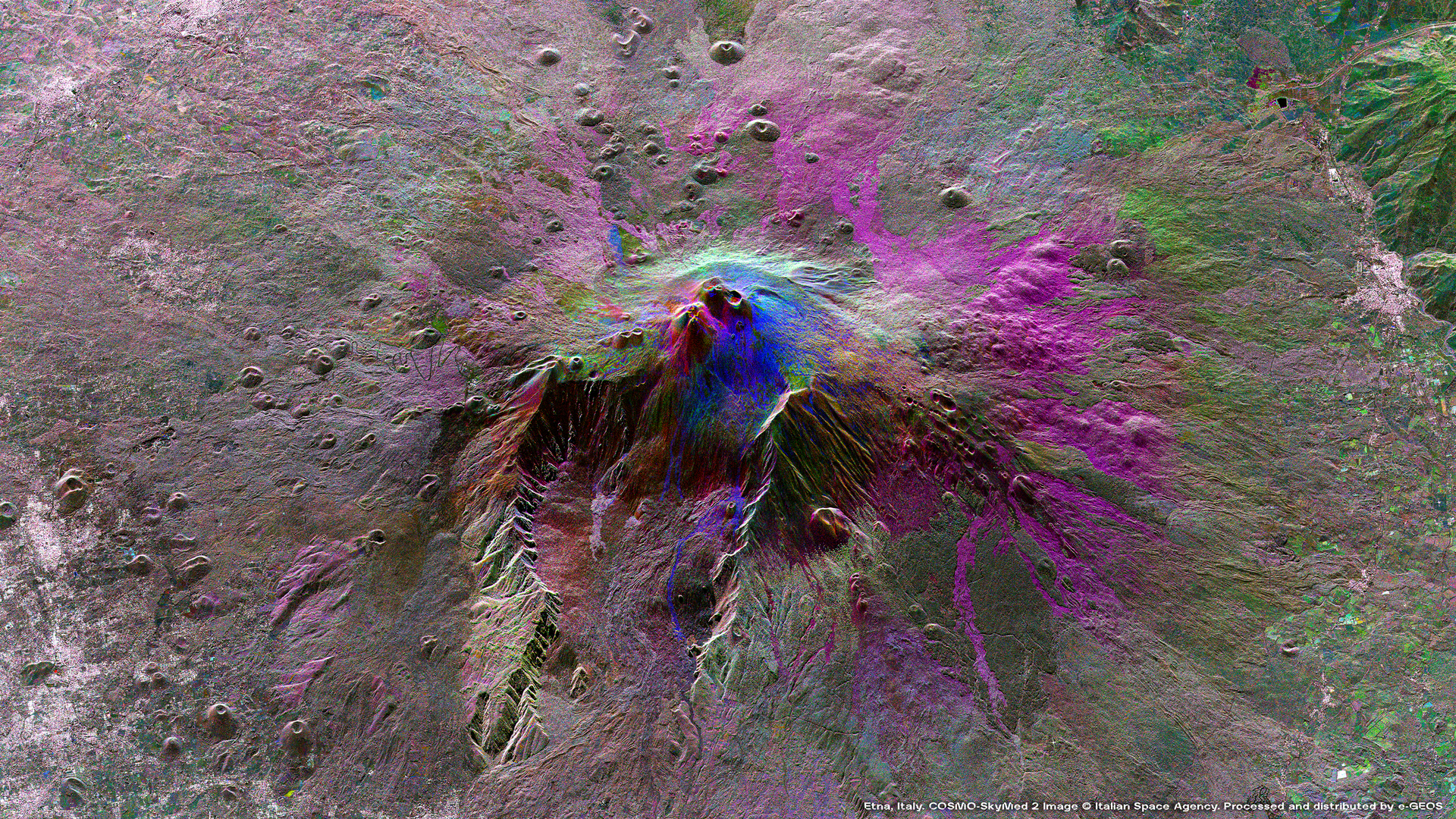
The instrument is optimized to precisely study the properties of extreme energy cosmic electrons up to dozens of TeV (“teraelettronvolts”). In fact, direct and high-precision spectral measurements at such energies may reveal important information to research dark matter and understand the evolution and operating mechanisms in our Universe. Furthermore, CALET is capable of measuring the relative composition and abundance of nuclei coming from space, from protons (which are their main component) to the heaviest elements of iron, with an atomic number of Z=40.
CALET is a mission sponsored by the JAXA (Japan Aerospace Exploration Agency) with the participation of the ASI and the NASA, in collaboration with researchers from Japanese universities and Italian and American institutions. The Italian Space Agency has been participating in the CALET mission since 2011, by supporting researchers from the Universities of Siena, Pisa, Florence, Padua, Tor Vergata and the IFAC-CNR (Institute of Applied Physics – National Research Council). The Italian contribution was essential to develop the instrument and the high-tension power supply system. As of today, the Italian researchers participate in managing the CALET apparatus during in-orbit operations and analysing data sent to Earth, covering a broad spectrum of scientific aspects: from understanding mechanisms related to the origin, acceleration and propagation of cosmic rays – the main research topic of the CALET – to the study of high energy gamma-rays, transient GRBs (Gamma-Ray Bursts) phenomena, phenomena related to solar physics and space weather applications, and the research of possible multi-messenger counterparts to events related with the emission of gravitational waves.
In the first 3 years of data capturing, the CALET acquired and transmitted to Earth about 1,8 billion observed events. The data is made available to Italian research groups, which analyse it, and the results are subsequently published through the Cosmic Ray Database (CRDB), a public access service to data provided by the Space Science Data Center (in Rome, by the ASI).
The scientific results obtained by the CALET, which are described in detail on the CALET web site, are providing new key information to understand cosmic-ray physics. The CALET will continue its observation activity until at least 2021: the quantity of data collected by the CALET until the end of the mission will significantly increase the perspectives to provide answers to several open questions as regards the operating and evolution mechanisms of our Universe.